

一、引言
无人机载多光谱成像采集东北寒地水稻的过程包括对信息的获取、传输、处理及判断分析和应用的过程,利用无人机载多光谱设备进行水稻冠层的辐射信息的采集过程。在整个遥感过程中,辐射能量一般来源于目标的3个方面:太阳辐射、目标自身产生的辐射及遥感器的电磁波发射。在此过程中,会受到若干因素的影响如太阳的方位、季节的改变、地表的状况、地理位置的选择、遥感仪器在当天的工作性能等,从而也会影响遥感数据采集时产生辐射误差和几何误差,因此要对影像进行相关的校正处理。
无人机载多光谱成像的数据采集
2.1光谱成像识别系统
任何物体都有其独特的光谱特征。具体来说,它们具有不同的吸收、反射、辐射光谱。在同一光谱区域内,不同物体的反射会不同(同谱异物),同一物体对不同光谱的反射也可能会显著不同(同物异谱)。此外,由于太阳辐射角度的不同,即使是同一物体,在不同的时间和地点也会表现出不同的反射或吸收光谱。
光谱探测技术正是依据上述基本原理,对物体光谱进行了相应的特征识别。而把光谱探测技术和图像识别方法运用于同一个学科领域就形成了一种光谱成像识别系统,形成的光谱成像识别系统可以分为三个主要组成部分:平台、地面控制系统和研究分析方法系统。平台主要包括地面平台(卫星、无人机)和成像光谱仪,成像光谱仪主要进行数据的收集和传送;地面控制系统主要进行数据的接收、储存、开发等操作;研究分析方法系统主要完成实验定标、地面试验、光谱数据的测量与分析等工作,并对地面接收到的图像信息进行图像融合、大气校正、几何校正后获取反映地物的性质与状态等信息。光谱成像识别系统的组成部分既相互联系又各自有分工,共同完成光谱成像识别对地面目标的探测,实现对目标的定位、定性或定量的目的。一般情况下,光谱成像识别系统又可分为以下4个组成部分:目标物、光谱成像识别的数据采集与传输系统、光谱成像识别的数据接收与处理系统以及光谱成像识别的数据分析与应用系统,如图1所示。
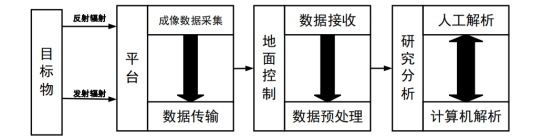
图1光谱成像识别的过程与技术系统
2.2无人机及多光谱设备
采用无人机多光谱对测试区域进行多光谱图像采集。在图像拼接过程中,将无人机多光谱图像导入软件,软件能够自动读取相机配置信息和定位系统数据,然后进行辐射校准。最后,生成数字地表模型、数字正射影像,并进行几何校正和图像配准。

图2无人机高光谱成像系统
2.3试验田规划
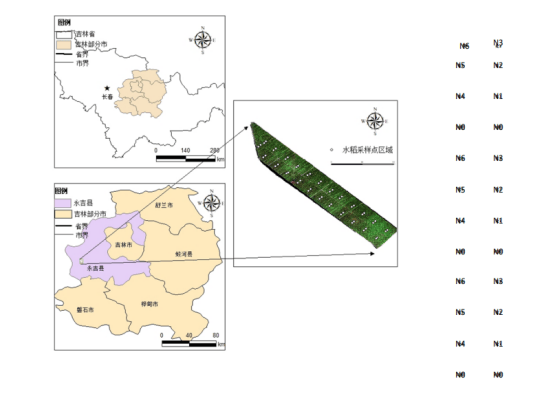
图3试验区地理位置、地块试验小区划分
本实验主要随时间演变对东北寒地水稻稻瘟病病害等级的遥感信息诊断进行研究,具体实验方案如下:
试验时间:试验于2020年5-9月进行。
试验地点:水稻稻瘟病试验在吉林省吉林市万昌镇进行,该区域位于北纬43°44′49″,东经125°54′11″,该地区处于吉林大黑山东麓饮马河东岸河谷平原区,属北温带大陆性季风气候,年降水量适宜,四季分明,适合水稻的种植,农业熟制为一年一熟。
试验品种:吉粳88作为试验品种,取自吉林省农业科学院,全生育期150天;苗期对稻瘟病发表现为抗,异地田间自然诱发叶瘟鉴定表现中抗~高抗,异地田间自然诱发穗瘟鉴定表现为中抗~抗高抗,穗瘟最高发病率60%;株高100厘米,株型紧凑,叶片坚挺上举,茎叶浅淡绿,主穗长18cm,半直立穗型,平均籽粒数120粒,籽粒椭圆,颖及颖尖均黄色,千粒重22.5g;蒙古稻作为传播稻瘟病品种,蒙古稻可以感染大多数稻瘟病小种,且叶瘟在田间抗性极弱而且稳定,作为较理想的感病对照。
试验处理:于2020年5-9月种植试验品种水稻,试验区总面积约10000m,试验田为3组重复试验,每组试验田下又分为8个不同氮含量处理下的小区,每次都设有对照组及不同施肥的氮量对应的试验小区,表1为试验小区(N0-N6)中施氮含量,每个试验小区中央插有易感病且对稻瘟病抗性很差的蒙古稻,7-8月对蒙古稻喷稻瘟病菌,开展稻瘟病试验,对照组则不接种蒙古稻,试验田的管理方式按照大田模式进行,最大限度的模拟自然发病情况。并统计了试验田的病害率。
病害率(%)=病害株树/水稻总株数×100%
试验区地理位置、地块试验小区划分如图4所示,地块中白色区域为人工采样区域,采样区域按国家标准(1m×1m)进行采样,十次一组,共计480个;水稻田的RGB与假彩色图如图4所示。采集时间:水稻生长中的分蘖期、拔节期、孕穗期、灌浆期
表1水稻地块规划
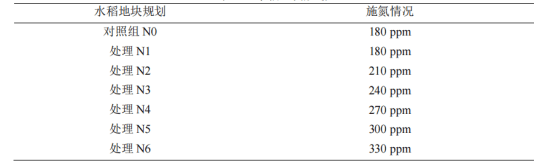

图4万昌水稻田原始图与假彩色图
2.4无人机载多光谱相机的飞行与采集方式
无人机多光谱影像的获取会在中午进行,时间选取为上午10点到下午2点之间,在晴朗无云的天气,保证太阳辐射的充足与稳定,而太阳高度角的变化可能会改变光照条件,它会随着时间的变化而变化,会引起图像辐射值的误差,为避免太阳高度角对水稻冠层辐射的误差,采用太阳高度角计算器,在同一太阳高度角下采集水稻冠层数据。采集时风力的要求不超过4级,以保证无人机飞行的安全性及云台的稳定性,且航测时,平行的航线,左右相邻的影像不低于50%的重叠率,在航向的方向上,前后相邻的影像具有不低于60%的重叠率,以保证图像拼接的完整性。同时需要考虑禁飞区域、周边建筑与电线高度、电磁干扰等环境因素。无人机在起飞前进行安全检查,确保设备的正常运行。
三、结果与讨论
水稻叶片在生长初期,叶绿素的含量与辐射能吸收会呈现很大的相关性,随着叶绿素含量的增加,健康的叶片中会充满了水分而膨胀,对任何辐射能都是一种较好的反射体,因此蓝、红波段的吸收会增强,绿波段的反射率降低,近红外波段的反射率增强,植被指数大体呈上升趋势,而随着叶绿素含量增加一定程度后,吸收率会近于饱和状态,反射率变化较小,植被指数的变化会变得不明显;当水稻叶片在被稻瘟病破坏后,水分代谢受到阻碍,其叶内组织随之被破坏,叶片逐渐枯死,叶绿素的含量降低,导致蓝、绿、近红外波段的反射率降低,红波段的反射率会增加,植被指数的差异变得明显。
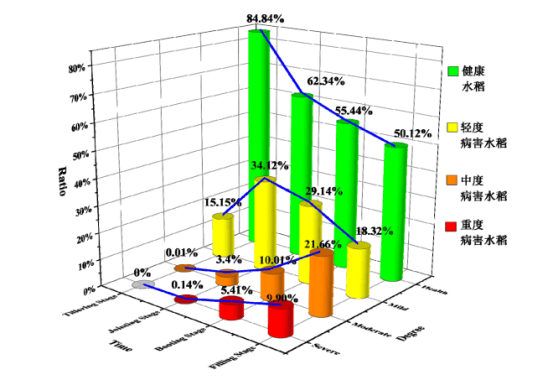
图5水稻在不同时间下稻瘟病害程度占比
通过对水稻试验田做氮胁迫处理后,采集四次试验田的多光谱影像的植被指数(RVI、EVI、NDVI、NDRE、GNDVI、BNDVI)结合水稻冠层的地物光谱仪的标定数据进行稻瘟病的动态监测,在分蘖期采集多光谱的植被指数影像进行稻瘟病等级分析,RVI、NDVI、GNDVI、BNDVI都比较准确;而到了拔节期,RVI、NDVI的信息能够对稻瘟病等级有较好的指示意义,NDRE、GNDVI、BNDVI在判断是否有病害的情况可以做辅佐手段;在孕穗期,由于水稻生长茂密,叶片覆盖度较高,RVI、NDVI的指示意义降低,BNDVI的信息具有对水稻试验田的稻瘟病等级准确的分级,GNDVI、NDRE可作为辅佐判断病害信息;在灌浆期,NDRE最为准确的反映水稻试验田的稻瘟病最终病害情况,地块1,2,3都呈现了水稻试验田的稻瘟病害情况随着氮含量的增加,其得病的概率与病的程度成正比,每个地块中N2与N3试验田的稻瘟病是由于风向(自西南向东北)以及与N5,N6共水渠原因,导致其病害较为严重。在整体植被指数中,EVI的指示意义较低,原因为其大气与土壤的校正因子与东北寒地不太匹配。
同时将每日的水稻遥感影像结合最佳植被指数分析水稻稻瘟病的程度占比,如图5,其中绿色代表健康水稻,黄色代表轻度患稻瘟病水稻,橙色代表中度病害水稻,红色代表中度病害水稻,根据这种动态监测,发现随着时间的推移,健康水稻所占全部试验田趋于50%,水稻的感病率在降低,原因是东北地区随着季节的推移,病菌所处的环境温度降低,导致其活性降低,且选取的水稻为抗病品种。
对不同时期的遥感影像做植被指数变换的数值作为参量代入LDA与决策树分类模型中,可以较好的对水稻是否感病且病害程度进行分类,可以发现:在分蘖期的数据中,采用LDA结合GNDVI的效果最好,准确率为97.66%;在拔节期,采用决策树结合NDVI的效果较好,准确率为96.65%;在孕穗期,采用决策树结合BNDVI的效果较好,准确率为96.96%;在灌浆期,采用决策树结合NDRE的效果最好,准确率为99.90%。

综上所述,在水稻生长前期,可以采用RVI、NDVI的遥感影像对水稻的生长状态做出判断,而由于叶片对绿色波段的敏感性,GNDVI可作为前期对水稻稻瘟病害判断的依据;水稻生长中期,水稻叶片的冠层覆盖度高,RVI与NDVI的判别会出现误差,稻瘟病害会破坏水稻叶片内部的组织结构,蓝色波段的敏感性提高,BNDVI可作为中期对水稻稻瘟病病害判断的依据,并进行合理性的喷洒农药;而到了水稻生长的后期,受稻瘟病影响,水稻叶片大面积受损,近红外、红波段的敏感性大幅度提高,NDRE可作为后期对水稻病害判断的依据。以上这贯穿寒地水稻整个生长期在不同阶段的不同的植被指数作为水稻监测指标参数,具有实践价值。
四、总论
本文主要针对水稻稻瘟病难以大面积监测的难题,以无人机载多光谱成像技术,开展水稻稻瘟病的光谱特性研究,为奠定“智慧农业、精准农业”中的水稻生长和病虫害检测服务。主要开展的工作为:选取适用于水稻光谱识别研究的无人机多光谱成像设备,依据水稻叶片冠层的反射原理,获取了分蘖期、拔节期、孕穗期、灌浆期的东北寒地水稻冠层地面光谱数据与无人机载遥感影像数据,对遥感影像数据做大气校正、几何校正和几何裁剪等遥感预处理后提取光谱信息进行植被指数的稻瘟病等级的反演。获得结论:在水稻生长的分蘖期与拔节期,采用RVI、NDVI的遥感影像可对水稻的稻瘟病的态势做出判断;在水稻生长的孕穗期,BNDVI可作为中期对水稻稻瘟病病害判断的依据;水稻生长的灌浆期,NDRE作为后期对水稻病害判断的依据。最后将植被指数结合LDA与决策树分类模型分析后,可以较好识别水稻在不同生长期的稻瘟病的态势,实现了对稻瘟病的快速监测。
以上研究工作通过光谱学的探测方法识别东北寒地水稻稻瘟病的态势,经过对比,用无人机载多光谱成像进行稻瘟病识别可行性很高,不会受较多因素的影响,实验过程中也可以根据实验需要对光谱相机的各个光通道以及内部的指标进行调整,实验中也可以对不同方位、角度等进行探测,即使参照量不同,获得的不同遥感图像也可以作为识别的数据源。
